国家自然科学基金委员会 2009 年起每年举办一届“智能车未来挑战赛”,研发具有自然环境感知与智能行为决策能力的无人驾驶汽车,并通过真实道路环境下的自主行驶来检验研究成果。2011 年国防科技大学与一汽合作研发的红旗 HQ3 无人驾驶车完成了从长沙至武汉286公里的高速全程无人驾驶实验,标志着我国无人车在复杂环境识别、智能行为决策和控制等方面实现了新的技术突破。
2013-2016:互联网巨头下场,初创厂商涌入
2013 年百度开启无人驾驶项目,陆续于北京、加州进行路测,并在乌镇开放无人驾驶车辆试运营。华为与百度同年起步,与车企进行合作逐步迈入车联网供应商序列。AutoX 于本阶段尾声入场,2016 年成立后于同年完成开放道路测试。小马智行于 2016年 12月创立,切入 Robotaxi领域。景驰、Roadstar等相继入局,自动驾驶浪潮袭来。
2017-2021:巨头发力,迈入领先
此阶段中国自动驾驶实现跨越式发展。百度发布Apollo 计划并经 4 年演绎实现 Robotaxi落地商用探索,同时L4 级自动驾驶解决方案也已降维装车量产;华为明确其市场定位,为主机厂提供优质智能汽车解决方案,以自动驾驶、车联网等核心技术赋能主机厂;自动驾驶独角兽与小马智行技术进程不断推进,陆续推出、完善产品及服务。同时期,自动驾驶产业链逐渐成熟,上游核心传感器厂家不断涌现,下游场景解决方案纷纷开始落地。据 2021年加州 DMV发布的《2020年自动驾驶接管报告》数据显示,中国自动驾驶领域的头部参与者已逐渐成为国际自动驾驶行业领先选手,AutoX与Pony.ai 的 MPI(脚注:Miles per Intervention,平均每次接管的行驶里程间隔)指标上榜前五名,紧随 Waymo、Cruise之后。
计划到 2025年,中国标准智能汽车的技术创新,产业生态,基础设施,法规标准,产品监管和网络安全体系基本形成。除了积极推进政策立法,2018 年开始,智能网联汽车示范区也在全国陆续开花。除工信部合作推进的一批智能网联或自动驾驶示范区成立外,陆续有部分省市通过与机构合作,或资本合作等形式,打造基于自身产业需求的智能网联汽车测试场景。其中,以北京经济技术开发区全域为核心的北京市高级别自动驾驶示范区,是全球首个网联云控高级别自动驾驶示范区。2021 年成立至今,目前已累计开放 1,000 公里自动驾驶测试道路,测试里程超过 300万公里,开通 5G基站 5.64万个。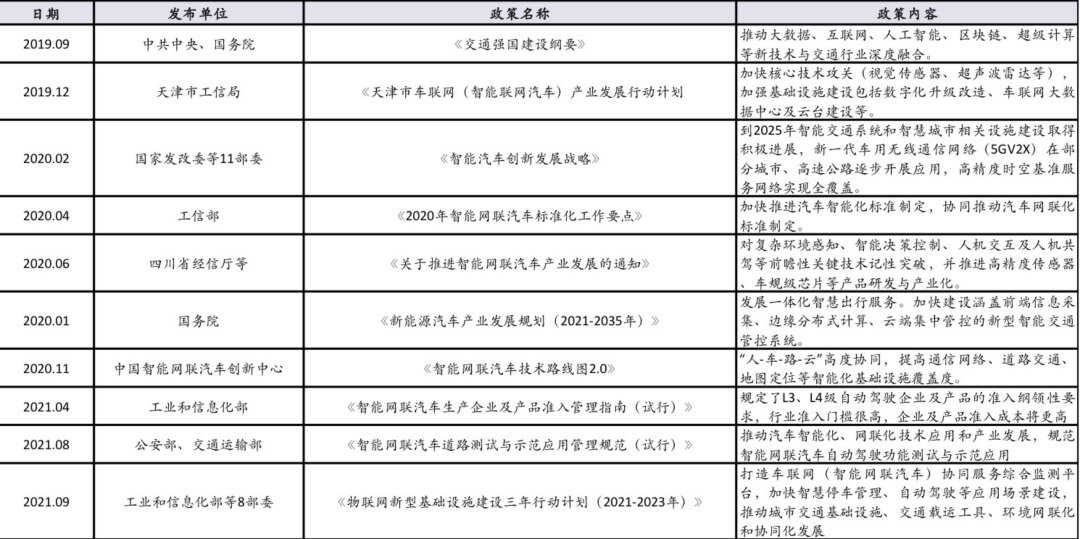
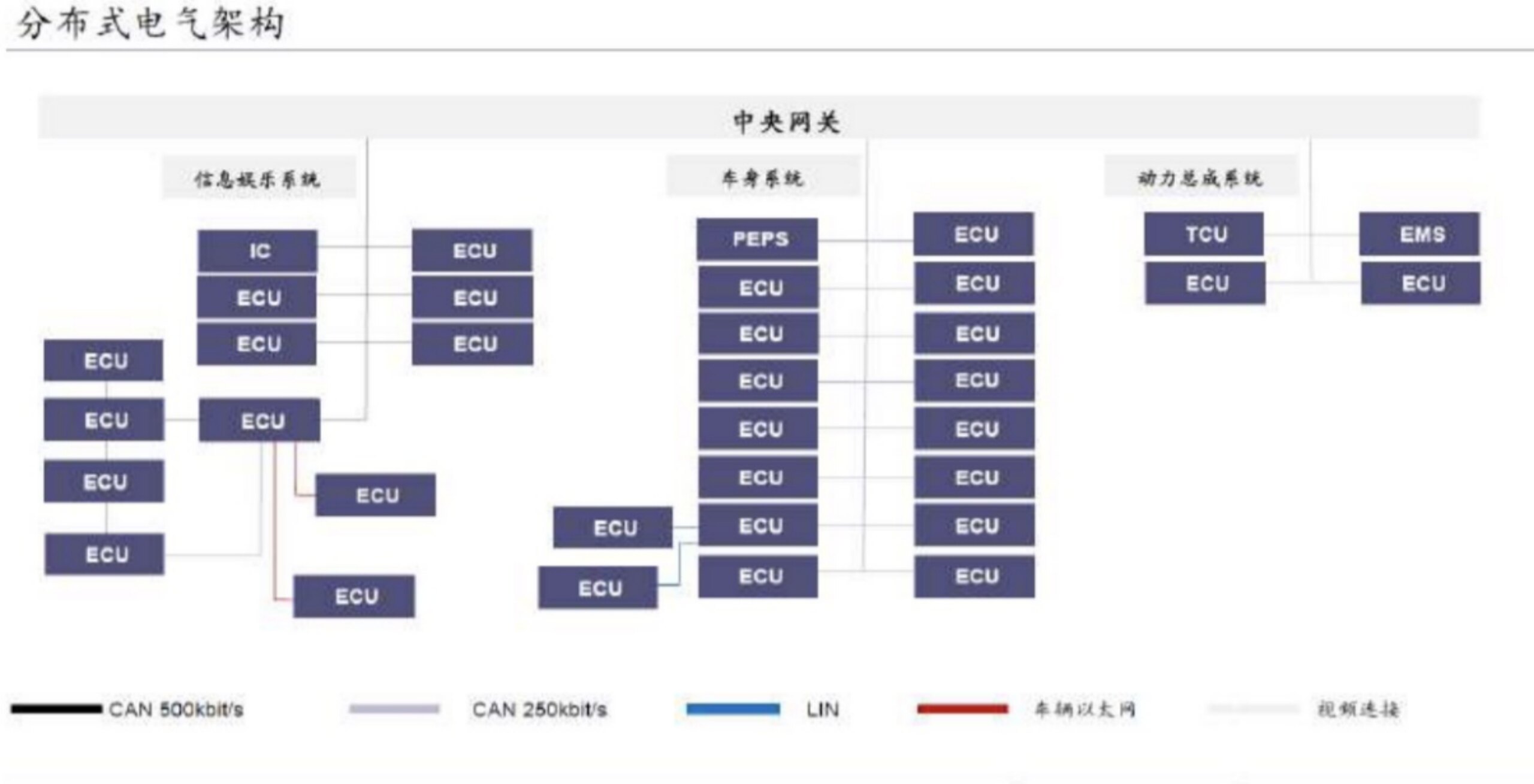
传统汽车主要采用分布式电气架构,即每个车载功能对应一个或多个 ECU(汽车电子控制器),各 ECU 之间通过 CAN 总线进行信号传输。ECU主要用于接收来自传感器的信息,进行处理后,输出相应的控制指令给到执行器执行。整车企业电控系统开发的主要工作(软件算法,匹配标定等)都依托与ECU完成。